Fundament-sarjan KSA:n tarkoitus ja kokoonpano.
1) "Säätiö" on tarkoitettu:
Eri tutkalaitteista (tietolähteistä) tulevien ilmatilannetta koskevien tutkatietojen (RLI) keräämis-, käsittely- ja näyttöprosessien automatisointi,
Sen myöntäminen ylemmille, vuorovaikutuksessa oleville, tuetuille ja alaisille komentopisteille (PU), - alaisten radiotekniikan yksiköiden hallinta ja
Ratkaisuja muihin (tieto- ja laskenta)ongelmiin.
2) "Foundation"-sarjan KSA tarjoaa:
Tutka-asemien (RLS), tutkakompleksien (RLK), toissijaisten tutkien (SRL), integroidun maanpäällisen tutkakyselylaitteen (GNRZ), ilmailun (helikopteri) tutkapartio- ja opastuskompleksien tutkakuvien keräämis- ja käsittelyprosessien automatisointi (V)K RLDN) ja radiotekninen tiedustelu (RTR), alisteiset ja vuorovaikutuksessa olevat radiotekniset yksiköt ja yksiköt;
Alisteisten tietolähteiden ja ylimpien, vuorovaikutuksessa olevien automaattisten lennonjohtopisteiden (ATC) hallinta;
Tieto- ja laskentatehtävien (ICT) ratkaisuprosessien automatisointi taistelu- ja taisteluoperaatioissa, logistiikka, radioteknisten yksiköiden ja alayksiköiden tekninen ja erikoistuki.
3) KSA:n ratkaisemia tehtäviä ovat mm.
Vastapuolen ilmavihollisen kykyjen arviointi;
Sen joukkojen radioteknisten kokoonpanojen ryhmän tutkakentän parametrien laskeminen; - RTV-yksiköiden ja alayksiköiden taistelukäytön suunnittelu kehittyvän tilanteen erilaisissa olosuhteissa.
4) "Foundation"-sarjan KSA koostuu:
Kiinteä laitesarja (tuotteet 44B6, 79B6, 82B6, jotka ovat KSA:n kiinteää mallia);
Taistelunohjausajoneuvot (MCV);
Komento- ja henkilöstöajoneuvo (CSM);
Matkaviestinyksikkö (MCC); - varaosien ohjaamot (varaosat);
Diagnostiikka- ja huoltokoneet (MDTO);
Virtalähdejärjestelmät
KSMA-perussarjan teknisten välineiden kompleksien koostumus ja niiden ominaisuudet.
KSMA sisältää seuraavat tekniset keinot:
Tietojenkäsittelylaitteet (CS);
Tietojen näyttötyökalut (ID);
Tiedonsiirtolaitteet (DTS);
Operatiivisen komentoviestintävälineet (SOKS);
Laitteet viestintäkanavien järjestämiseen (AOKS)
Työkalut tietojen dokumentointiin ja raportointiasiakirjojen laatimiseen (SDOC)
Virtalähdetilat (PSS).
Atk-laitteet (CS) tarjoavat rinnakkain hajautetun menetelmän tietojenkäsittelyyn, mikä lisää laskentaresursseja ja niiden varaamista. Jokainen automaattinen työasema, jossa on näyttötilat yksilölliseen käyttöön, sisältää: järjestelmäyksikön henkilökohtaisesta tietokoneesta; monitori; aakkosnumeerinen näppäimistö; graafisen tiedon manipulaattori; keskeytymätön virtalähde. Yhteiseen käyttöön tarkoitettu näyttölaitteisto koostuu seinäkankaasta ja korkearesoluutioisesta videoprojektorista (eri muunnoksia voidaan toimittaa), jotka on kytketty AWS No1:n järjestelmäyksikköön (komentajan työasema). Tiedonvaihdon nopeus ulkoisen tilaajan kanssa järjestettäessä riippuu: - käytetystä tiedonsiirtoalgoritmista, joka määräytyy tilaajan tyypin mukaan (AKKORD-SS-PD, ARAGVA), - tarjottujen tiedonsiirtokanavien laadusta ja voi kestää seuraavat erilliset arvot - 1200, 2400, 4800, 9600 bps.
Operatiivisen komentoviestintävälineet (SOKS) tarjota kommunikaatiota automatisoitujen työpaikan toimijoiden ja ulkopuolisten tilaajien välillä viestintäkonsolien (CS) kautta ja tiedottaa komentoaseman taistelumiehistölle taisteluhälytyssignaaleista varoitustaulun avulla. Operatiivisen komentoviestinnän järjestämiseen voidaan käyttää: sarjaa operatiivista viestintälaitteistoa AKOS-1 tai sarjaa operatiivista komentoviestintälaitteistoa KAOX.
Työkalut tietojen dokumentointiin ja raportointiasiakirjojen laatimiseen (SDOC) on tarkoitettu rekisteröintiin, varastointiin, viitetietojen dokumentointiin ja raportointi (lopullisten) asiakirjojen (teksti ja graafinen) rakentamiseen kertaluonteisesti. Telekooditietojen dokumentointi automaattisen ohjausjärjestelmän tietokonelaitteiden ja ulkoisten tilaajien välisen tiedonvaihdon aikana tapahtuu IRZ-työasemalla.
Virtalähdetilat (PSS) koostuu: - sarjasta paneeleja, laatikoita ja kaapeleita virtalähteiden kytkemiseen ja jakamiseen (sisältyy asennusosien sarjaan); - keskeytymättömät virtalähteet (UPS); - laitteiden maadoitusjohdot (sisältyvät asennusosien sarjaan).
KSA:n toimintatilat Perusteet, tilojen ominaisuudet, kunkin tilan tehtäväluettelo.
"Foundation"-sarjan KSA tarjoaa seuraavat toimintatilat:
Taistelutila;
Offline-tila.
Taistelutila (combat duty) on tila, jossa ratkaistaan toiminnallisia perustehtäviä ja tehdään rajapintoja ryhmään kuuluvien ulkoisten tilaajien kanssa.
Autonominen tila (KSA-asetustila) - tässä tilassa suoritetaan seuraava:
KSA:n käyttöönotto,
Teknisten laitteiden autonominen toiminta ja konfigurointi,
Dislokaatiovakioiden ja vaihdettavien arvojen laskenta ja syöttäminen, digitaalinen maastokartta, topografinen pohja, tiedot vihollisen ilmapuolustusvoimista ja ystävällisistä joukkoista,
Useita ongelmia ollaan ratkaisemassa,
Tietokantoja muodostetaan ja korjataan.
KSA ATC "Alpha"
Alfa-lennonjohtoautomaatiojärjestelmä (ATC Alfa ATC) on universaali järjestelmä, joka mahdollistaa ohjauksen kaikissa lennon vaiheissa, mukaan lukien nousu, nousu, lasku sekä ohjaus koko reitin ajan. Alfa-lennonjohdon automaatiojärjestelmä (ATC ACS) on suunniteltu automatisoimaan keskisuuren ja korkean lentoliikenteen intensiteetin lennonjohtokeskuksia. Kompleksi tarjoaa ilmatilanteen, suunnittelun, sää- ja ilmailutietojen vastaanottoa, käsittelyä, näyttöä ja integrointia ATM-asiantuntijoiden työpaikkojen korkearesoluutioisille näytöille.
Kompleksi automatisoi ilmatilanteen analysointiprosessit, ATC-menettelyt ja ohjauspaneelin toiminnot. Tietolähteitä voivat olla kaikentyyppiset tutka-asemat ja suunnanmittaajat, sääasemat ja -kompleksit, satelliittinavigointi- ja lennonjohtojärjestelmät (AZN-B, ADS-K), maan lennätinkanavat ja digitaaliset linjat. Venäjän federaation liikenneministeriö suosittelee maa- ja vesirakennusyritysten varustamiseen.
KSA ATC "Alpha" tarjoaa:
valvontatietojen kerääminen ja käsittely erilaisista lähteistä
monisensorinen valvontaprosessi (RDPS)
suunniteltujen tietojen vastaanottaminen ja käsittely (FMS)
yhdistämällä suunnittelu- ja valvontatiedot
sää- ja ilmailutiedon vastaanotto ja jakelu
näyttää yhdellä näytöllä tiedot nykyisestä ja ennustetusta ilmatilanteesta, suunnitellut tiedot sekä sää- ja ilmailutiedot
Turvallisuussuositukset: lyhyen ja keskipitkän aikavälin konfliktivaroitukset, rajoitettujen alueiden varoitukset, vähimmäisturvakorkeusvaroitukset (STCA, MTCD, MSA W, TSN)
suunnitellun reitin noudattamisen sekä lähtö- ja saapumismenettelyjen valvonta
nauhaton prosessiohjaustekniikka
20. 20. Automaatiotyökalut. Arm.
Lähettäjän työaseman ihmisen ja koneen välinen rajapinta on toteutettu Eurocontrolin suositusten mukaisesti kotimaan lennonjohtojärjestelmän erityispiirteet huomioiden.
ATC ATC "Alpha" sisältää ryhmä- ja yksittäisvarusteet. Ryhmälaitteet vastaanottavat ja käsittelevät tietoa sekä välittävät käsiteltyä tietoa välitystyöasemille paikallisen tietokoneverkon avulla. Yksittäiset laitteet vastaanottavat ja näyttävät ryhmälaitteissa vastaanotetut ja käsitellyt tiedot.
Tietojen näyttöjärjestelmä "Nord"
"Remote A" -sarjan yleiskaukosäädin
Äänenvaihtojärjestelmä "Megafon"
Tietojen vuorovaikutus ja tiedonsiirto Alpha ATC -automaattiohjausjärjestelmään tapahtuu paikallisen tietokoneverkon (LAN) kautta.
ATC ATC “Alpha” näyttää ensisijaiset koordinaattitiedot digitoidussa analogisessa muodossa ja toissijaiset koordinaatit ja lisätiedot (lento) digitaalisessa muodossa.
Lentokenttäalueen lennonjohtajien automatisoidut työasemat AS ATC "Alpha" on suunniteltu automatisoimaan lennonjohdon prosesseja lentoasemilla ja lennonjohtoalueilla, joilla on keski- ja korkea lentoliikenneintensiteetti.
Alpha-järjestelmän ATC-lennonjohtajan työasema ratkaisee seuraavat tehtävät:
useiden tietokerrosten yhdistetty näyttö:
kartografiset tiedot (lentoreitin rakenne, pakolliset ilmoituspisteet, valvontavyöhykkeiden rajat, lähestymis- ja poistumissuunnitelmat, topografiset karttaelementit);
atsimuuttietäisyysmittausverkko valvontatutkamoodia varten ja lähestymisohjauksen vertailuviivat (liukupolku, kurssi, sallitut poikkeamat jne.) laskeutumistutkatilassa;
digitaaliset koordinaatit ja muut lentotiedot (koordinaatisymbolit ja seurantalomakkeet);
suuntahakutiedot (digitaaliset arvot ja suuntimaviivat);
suunnitellut tiedot (suunnitelmataulukko, menettelyjen valvonnan toiminnalliset lisäikkunat);
säätiedot (vaarallisten sääilmiöiden vyöhykkeet);
nykyisten kieltojen ja rajoitusten vyöhykkeet;
lisälähetystiedot läpinäkyvien ikkunoiden muodossa;
tietokerrosten koostumuksen ja näyttöparametrien nopea konfigurointi;
käyttäjän kartografisten elementtien nopea lisääminen ja muokkaaminen;
nopea kuvan mittakaavan vaihto ja kuvan keskustan siirto mihin tahansa näytön kohtaan;
mahdollisuus avata lisäikkunoita (mukaan lukien pystysuorat ikkunat);
seurantalomakkeen (FS) toissijaisen aakkosnumeerisen tiedon alkuperäinen sitominen koordinaattisymboliin jokaisessa työpaikassa manuaalisesti ja automaattisesti;
ilma-alusten seuraaminen ilman transpondereita tutkasta digitaalisesti vastaanotettujen tutkakuvien avulla ja mahdollisuus "sidota" FS manuaalisesti;
tietyllä vastuualueella lentävän ilma-aluksen FS:n tyypin ja täydellisyyden automaattinen muutos, jonka lähettäjä on aiemmin määrittänyt;
tietyn lennonjohtajan ohjausalueen ulkopuolella sijaitsevien, mutta näytöllä koordinaattisymbolin muodossa olevien ilma-alusten FS:n operatiivinen (nopea) katselu;
sitoutuu jokaiseen vastaavan FS:n koordinaattimerkkiin, joka näyttää lisälentotiedot ja lasketut arvot:
lentokoneen kutsutunnus (lennon numero);
VRL-koodi (transponderikoodi);
merkki johdon omistajuudesta;
nykyinen lentokorkeus;
merkki korkeuden muutoksen trendistä (nousu/lasku);
annettu korkeus;
määränpää;
allekirjoitettu juna;
atsimuutti ja etäisyys;
leveys-ja pituuspiiri;
merkkejä puuttuvista koordinaateista ja korkeuspäivityksistä, "Track suunnitelman mukaan" -tila;
kunkin ilma-aluksen tiettyjen tapahtumien esiintymisen valvonta, jonka signalointi suoritetaan näyttämällä erikoissymboleja tai korostamalla tiettyjä tietokenttiä värillä:
"hätä-", "hyökkäys"- tai "radioyhteyden katkeaminen" -signaalin vastaanottaminen ilma-aluksesta;
ilma-alukset saapuvat rajoitetulle alueelle tai alueelle, jossa sääolosuhteet ovat vaaralliset;
laskeutuminen vähimmäisturvallisen korkeuden alapuolelle;
VRL-koodien kopiointi;
poistettu VRL-koodi;
epäonnistuminen tietyn lentokorkeuden ylläpitämisessä;
lentokonetta ei ole liitetty lentosuunnitelmaan;
poikkeama tietystä reitistä;
ilma-aluksen sijainnin ennustaminen viipymättä määrätylle ajalle (enintään 30 minuuttia) nopeusvektorin muodossa, mukaan lukien ilma-aluksen suunniteltu lentorata;
ilma-alusten välisten erottelustandardien rikkomusten (konfliktitilanteiden) havaitseminen ja signalointi;
ilma-alusten välisten mahdollisten konfliktitilanteiden havaitseminen ja signalointi ennustetietojen perusteella;
ilma-alusten vaarallisten lähestymisten havaitseminen ja signalointi esteillä, pääsy kielto- ja rajoitusvyöhykkeille, vaarallisten sääilmiöiden vyöhykkeille;
turvallisen vähimmäislentokorkeuden alapuolelle jäävien ilma-alusten havaitseminen ja signalointi;
toissijaisen kanavan kautta vastaanotetun lentokorkeusarvon automaattinen analysointi ja uudelleenlaskenta lennonjohtovyöhykkeellä lentäessään siirtymätason alapuolella;
suunniteltujen ja olemassa olevien kielto- ja rajoitusvyöhykkeiden nopea keskitetty syöttö;
ARP-tietojen näyttö suuntimaviivan ja digitaalisen arvon muodossa jopa 32 kanavalle samanaikaisesti;
vaarallisten sääilmiöiden vyöhykkeiden, radiosondin lentoratojen ja nykyisen sään näyttäminen lentokentällä osana Kaukoidän ikkunan yhdistettyä kuvaa;
lentokenttien säätietojen METAR, TAF jne. näyttäminen erillisessä ikkunassa;
automaattiset ja/tai manuaaliset tilat kunkin ilma-aluksen ohjauksen vastaanottamiseksi/lähettämiseksi vierekkäisten ohjaussektorien välillä (viereiset ATC-järjestelmät);
automaattinen menettely ilma-aluksen lennonjohdon vastaanotto-/lähetyslinjojen ylittämisen olosuhteiden sähköiseksi koordinoimiseksi vierekkäisten ohjaussektorien välillä (viereiset automaattiset ATC-järjestelmät);
merkinnän manuaalisesti osoittaman sijainnin polaaristen ja maantieteellisten koordinaattien laskeminen ja näyttäminen sekä laskeutumistutkatilassa absoluuttiset poikkeamat kurssiviivasta tai liukupolusta;
minkä tahansa kahden pisteen välisen etäisyyden ja atsimuutin operatiivinen mittaus;
lentosuunnitelmien yhteenvetotaulukon näyttäminen suurella suodatinsarjalla;
lentosuunnitelman elementtien katselu, luominen ja muuttaminen;
automaattinen ja manuaalinen odotuslomakkeiden luominen vakiintuneille vastuualueille;
lentosuunnitelmien automaattinen ja manuaalinen tunnistaminen tutkatietojen avulla;
suunniteltujen tietojen automaattinen korjaus tunnistetun ilma-aluksen tutkatietojen perusteella;
automaattinen tilastotietojen kerääminen valmistuneista suunnitelmista ja niiden tarjoaminen jatkokäsittelyä varten CSA PVD “Planetissa” tai muissa sovelluksissa;
käyttäjien rekisteröinti (lähetys- ja tekninen henkilöstö), käyttöoikeuksien määrittäminen, henkilökohtaisten asetusten tallentaminen ja palauttaminen;
toiminta pienennettyjen pystyerotusstandardien (RVSM) tilassa;
joukko toimintoja, joilla varmistetaan paperiton prosessiohjaustekniikka;
automaattinen ja manuaalinen laukaisu sekä interaktiivinen simuloitujen ilma-alusmerkkien ominaisuuksien muutos lentosuunnitelman mukaisesti (track-by-plan);
läpikuultavuusteknologian käyttö, kun näytetään muita toiminnallisia ikkunoita;
varmistetaan konsolitoimintojen määrän minimointi lentosuunnitelmaparametreihin pääsyä ja niiden muuttamista varten;
Yleistä radioviestinnästä. (!!!EI LIPPUA!!!)
Ilmailualan tietoliikenne(AS GA) – joukko keskuksia, vastaanottimia, lähettimiä, radioasemia, päätelaitteita, erilaisia televiestintäverkkoihin kytkettyjä radioviestintävälineitä + tämän tietoliikenteen organisointi. GA AS:n on varmistettava seuraavat tehtävät:- ATS-keskusten toimesta miehistöille annettujen ohjeiden ja käskyjen välittäminen lentoliikenteen turvallisuuden varmistamiseksi, raporttien vastaanottaminen heiltä lennon kaikissa vaiheissa; - ATS-keskusten vuorovaikutus lennonjohdon, lennonjohdon ja lennonjohdon prosessissa. - operatiivinen vuorovaikutus lentoyhtiöiden (lentokoneiden ja lennonjohtoyritysten) välillä - hallinnollisten, johtamis- ja tuotantotietojen siirto. - ACS GA:n tiedonsiirto. Perus vaatimukset kaiuttimille:- viestinnän luominen ajoissa; - luotettavuus ja jatkuvuus; - vaaditun tiedonsiirron nopeuden varmistaminen; - vaaditun luotettavuuden varmistaminen; - ydinvoimalaitoksen toiminnan maksimaalinen tehokkuus ja kustannustehokkuus. AC on jaettu: - ilmailu kiinteä tietoliikenne, on suunniteltu varmistamaan vuorovaikutus lennonjohtokeskusten välillä, vuorovaikutus lentoliikenteen virtauskeskusten suunnittelun ja järjestämisen välillä, lentoasemapalvelujen tuotantoprosessin aikana sekä ilmavoimien viranomaisten kanssa. - ilmailu matkaviestintä, on tarkoitettu radiopuhelinviestinnän näyttöihin ja miehistöihin sekä tiedonsiirtoon koko lennon ajan rullauksen alusta laskeutumiseen ja rullauksen loppuun; ATS-keskukset ja pelastuspalvelut kommunikoivat hädässä olevien lentokoneiden miehistön kanssa. - Lähetys, miehistöille tiedottaminen lennon aikana operatiivisen FIS:n aikana (AFIS), automaattinen tiedonsiirto lentokentän alueella (ATIS), automaattinen säätietojen siirto miehistölle matkalla (VOLMET) Viestintä voidaan järjestää lineaarisen tai radiaalisen periaatteen pohjalta. Lineaarinen – kun rakennetaan viestintäkanavaa kahden pisteen välille. Radial – tarjoaa radioviestinnän käyttämällä yhtä radioasemaa kirjeenvaihtajaryhmän kanssa. AS:n päävarusteet: radiolähettimet, vastaanottimet, VHF- ja HF-asemat, VHF-radioasemat, automatisoidut vastaanotto- ja lähetyskeskukset, autonomiset toistimet, sää- ja lentotietojen automaattisen siirron laitteet, ilmailulaitteet. maanpäällinen tiedonsiirtoverkko ja TLG-viestintä, sanomakeskusten laitteet
Alisteisten IRLI:iden ilmoittaminen tehdään VO-tuen jatkuvuuden varmistamiseksi niille, omien varojensa hallintaan sekä IRLI:ltä suljetuille yksisyötteisille OKP:ille.
IRLI:n ilmoittamista varten valitaan VO:t, mukana KSA 97Sh6 VKP:n, naapurikomentopisteiden ja muiden alaisten IRLI:n tietojen mukaan ja jotka täyttävät kuulumisen tai lentoajan kriteerit tämän IRLI:n valintavyöhykkeelle. Jos valittujen VO:iden määrä ylittää IRLI:n kyvyn vastaanottaa tietoa, tiedot annetaan seuraavan prioriteettijärjestelmän mukaisesti:
HE sijaitsee valintavyöhykkeellä;
VO kasvavassa järjestyksessä lentoajan tietylle alueelle.
KSA PU rlr-tyypit 86Zh6, 86Zh6M, 86Zh6S eivät käsittele ilmoitustietoja viestinä itsenäiseltä IRL:ltä, vaan ne näkevät sen osana tilauskoodia, jonka tilauskoodi on "Ilmoitus" ja nolla reittinumero. Seuraavaksi se näytetään RLR PU:n työasemalla ilmapuolustuksen automaattisen sieppauksen järjestämiseksi. Nämä tilaajat näkevät tilauksen "Kohteen nimeäminen ilmapuolustuksen sieppaamiseksi" samalla tavalla. Kun KSA 97Sh6 on vuorovaikutuksessa tämän tyyppisten IRLI:iden kanssa, on suositeltavaa olla luomatta varoitustietoja niiden osoitteeseen ohjaustoiminnon muodossa, vaan käyttää vain "Target Designation" -tyyppistä tilausta varmistaakseen HE:n oikea-aikaisen sieppauksen. lähteen hallitsema tila.
KSA 97Sh6:ssa alisteisten IRLI:iden hallinta suoritetaan seuraavien tehtävien ratkaisemiseksi:
varmistaa yhtenäinen käsitys ilmatilanteesta korkeammalla ja alemmalla tasolla (ilma-aluksen ominaisuudet, määrätyt vaikutukset, ryhmittelytulokset);
VO-johdotuksen jatkuvuuden varmistaminen;
tietovirtojen säätely;
indikatiivisen tiedon määrittämisen luotettavuuden lisääminen (TVO, UGP);
varmistaa IRLI-varojen passiivinen suojaus PRS:ltä.
Ratkaisujen toteuttaminen näihin ongelmiin toteutetaan kehittämällä seuraavan tyyppisiä tilauksia (vastaavasti ilmavoimien automatisoidun ohjausjärjestelmän automaattisten ohjausjärjestelmien komennot):
määrittää ominaisuudet (komento noin joukosta numeroita) - PH;
määritä vaikutusmäärite - PVZ;
määritä ryhmänumero - PNG;
kohteen nimeäminen VO:n sieppaamiseksi - TsU VO;
kohdenimitys IP-kaappaukselle - IP-ohjauskeskus;
naapurin tavoite on CA;
nollaa VO saattajalta (kohdekomento - escort) - SBR;
lopeta tietojen antaminen VO - PV:stä;
palauttaa tietojen antamisen VO - BB:stä;
selventää UGP:n ominaisuuksia (komento tavoitteen mukaan - selventää affiliaatiota) - UH UGP;
sammuttaa (päälle) säteily - OFF (ON);
puhelinkeskustelu (yleinen komento) - TR.
Kaiken tyyppiset käskyt (komennot), paitsi "Puhelinkeskustelu"-käsky ja yleistyyppiset komennot, jotka on tarkoitettu OKS LBR -neuvottelujen järjestämiseen tai koodatun tiedon lähettämiseen, generoidaan KSA 97Sh6:ssa automaattisesti yksittäisten VO:iden suhteen.
KSA 97Sh6:ssa alisteisten IRLI:iden automaattinen ohjaus perustuu seuraaviin periaatteisiin:
hallinta suoritetaan ottaen huomioon VKP:lta ja OKP:lta tulevat komennot ja käskyt;
ohjaus suoritetaan ottaen huomioon KSA 97Sh6:n nykyinen tila (lataus mukana tulevien VO:iden lukumäärän ja syöttöviestien virran mukaan), alisteinen IRLI (lataus, taisteluvalmiustila) ja IRLI:lle suljetut välineet (päällä, pois päältä);
päätöksentekokriteerit kullekin toimeksiantotyypille ovat yhtenäiset - riippumatta IRL-tyypistä;
minkä tahansa tyyppinen tilaus (komennot) generoidaan IRLI:lle vain, jos IRLI hyväksyy tämäntyyppisen tai semanttisesti sitä vastaavan tilauksen.
Kun KSA 97Sh6 on vuorovaikutuksessa ilmavoimien ACS:llä KSA:lla varustettujen alaisten IRLI:iden kanssa, niille ei anneta voimanjakokäskyä (asettaa valintavyöhykkeen tietojen antamiseksi vaaka- ja pystytasossa), koska KSA 97Sh6 havaitsee tietoja näiden IRLI:n aiheuttama lentotilanne kokonaisuudessaan.
KSA 97Ш6:n luomien monen tyyppisten toimeksiantojen mukauttaminen tietyn IRLI:n havaitsemiin monenlaisiin tilauksiin suoritetaan ohjelmallisesti.
KSA 97Sh6 varmistaa seuraavien IRLI:n alaisten pyyntöjen ja raporttien vastaanottamisen ja käsittelyn:
puhelinkeskustelu - myöhemmin näyttö KSA:n automatisoidulla työpaikalla;
yleistyyppinen raportti tiimille - ja sen jälkeen näyttö KSA:n automatisoidussa työasemassa;
VO:lle on määritetty vaikutus-attribuutti, jonka jälkeen tämä määrite määritetään VO-reitille, joka on annettu IRL:ssä varoitustietojen muodossa.
KSA 97Sh6:lla vuorovaikutuksessa alisteisten IRLI:iden kanssa ratkaistavat toiminnalliset tehtävät on esitetty KSA 97Sh6 -ohjelmiston ”Sovelluskuvauksessa”.
2.10. KSA:n vuorovaikutus tilaajien kanssa selviytymistilassa
suorittaessaan johtavan ohjauspisteen tehtäviä
Jos PT-tason ohjausyksikkö, joka päätilassa suorittaa ylemmän tason ohjauspisteen toimintoja, epäonnistuu, aiemmin valmisteltu KSA 97Sh6 selviytymistilassa tulee johtavaksi (viite) KSA:ksi suhteessa saman tason muihin ohjausyksiköihin. taso.
Selviytymistilan varmistamiseksi KSA 97Sh6 -ohjelmisto ratkaisee KSA 98Sh6:n ongelmat KSA 97Sh6 -laitteiston ominaisuuksien puitteissa viestintäkanavien ja suorituskyvyn kautta.
Siirtyminen selviytymistilaan tehdään uudelleenkonfiguroimalla (tarvittaessa) tiedonsiirtokanavat ja CCS sekä käynnistämällä KSA-ohjelmisto uudelleen.
Johtajana toimiessaan KSA 97Sh6 voi toimia keskitetyssä tilassa (kun se on kytketty ylemmän tason komentopisteeseen, esimerkiksi RTBR-komentoasemaan, tai zrbr-komentoasemaan, kun se toimii osana ilmapuolustuksen automatisoitua ohjausjärjestelmää. SV) ja äärimmäisissä tapauksissa hajautetussa tilassa (VKP:n puuttuessa).
Suorittaessaan johtavan KSA 97Sh6:n toimintoja, se ratkaisee lisätehtäviä suhteessa päätilan tehtäviin:
vuorovaikutus HR PU:n alaisten kanssa;
vuorovaikutus yhdistetyn VKP:n kanssa;
vuorovaikutus yhdistettyjen tuettujen ja viereisten vuorovaikutteisten CP:iden kanssa, jotka on aiemmin suljettu "epäonnistunutta" VCP:tä vastaan.
Kytkettyjen tilaajien lukumäärä ja kokoonpano määräytyvät KSA 97Sh6:n taktisten ja teknisten valmiuksien mukaan (katso kohta 1.2).
Vuorovaikutus eri hierarkiatasojen tilaajien kanssa tapahtuu KSA 97Sh6:n tiedonvaihtorakenteiden ja toiminnallisten ongelmien ratkaisuperiaatteiden mukaisesti.
KSA 97Sh6 -laitteiston ja -ohjelmiston redundanssi toiminnallisten tehtävien koostumuksen ja eri hierarkiatasojen (VKP, SKP, OKP, PKP) vastaavien välineiden valikoiman suhteen mahdollistaa ratkaisemisen selviytymistilassa johtavassa KSA 97Sh6:ssa. korkean tehokkuuden tehtävät kerätä ja käsitellä tietoa (tutka, teknisestä kunnosta ja taisteluvalmiudesta jne.) eri lähteistä ja jakaa niitä eri kuluttajille sekä hallita alisteisia lähteitä (mukaan lukien RLR PU) ottaen huomioon ottaa huomioon VKP-komennot.
3. KSA:N LASKELMAN KOOSTUMUS JA SEN TOIMINNALLISET VASTUUT
3.1. KSA-laskelman kokoonpano
KSA:n koko taistelumiehistön kokoonpano on esitetty taulukossa. 3.1.
Laskelman sijoittelu työpaikkakohtaisesti riippuu järjestelmän työpaikkojen lukumäärästä, joka puolestaan määräytyy KSMA 44B6:n muutoksen mukaan (ks. ASGC.461262.002 E1).
Taulukko 3.1
| Numerot ARM-1 | |||||
| Laskuhenkilöt | |||||
| - | -01 | -02 | -03 | -04 | |
| Komentaja | AWS N1 | AWS N1 | AWS N1 | AWS N1 | AWS N1 |
| Henkilöstön päällikkö | AWP N2 AWP IRZ | AWP N2 AWP IRZ | AWP N2 AWP IRZ | AWP N2 AWP IRZ | AWP N2 AWP IRZ |
| Vanhempi tietojenkäsittelyoperaattori | AWS N2 | AWS N2 | AWS N2 | AWS N2 | AWS N2 |
| Vuorovaikutusoperaattori | AWS N2 | AWS N2 | AWS N2 | AWS N2 | AWS N2 |
| Operaattori MS | AWS N3 | AWS N4 | AWS N3 | - | - |
| Operaattori MS | AWS N4 | - | - | - | - |
| Tutkaoperaattori | AWS N3 | AWS N3 | AWS N3 | AWS N3 | AWS N3 |
Lyhennetyn laskelman henkilöiden kokoonpano on esitetty taulukossa. 3.2.
Taulukko 3.2
| Laskuhenkilöt | Numerot ARM-1 | ||||
| Toteutusvaihtoehto 44B6 ASGC.461262.002 | |||||
| - | -01 | -02 | -03 | -04 | |
| Operatiivinen päivystäjä (OD CP) | AWS N1 | AWS N1 | AWS N1 | AWS N1 | AWS N1 |
| Vanhempi tietojenkäsittelyoperaattori | AWS N2 | AWS N2 | AWS N2 | AWS N2 | AWS N2 |
| Operaattori MS | AWS N4 | AWS N4 | AWS N3 | - | - |
| Tutkaoperaattori | AWS N3 | AWS N3 | AWS N3 | AWS N3 | - |
Automatisoitu työpaikka ymmärretään automatisoiduksi työasemaksi, jonka avulla voit työskennellä koordinaatti-signografisessa näyttötilassa (reaaliajassa).
Omien kykyjensä mukaan mikä tahansa työasema (paitsi IRZ-työasema) voi toimia komentajan työpaikkatilassa. Toiminnallinen tarkoitus syötetään ohjelmistoa ladattaessa. Ensimmäisen käynnistyksen yhteydessä (oletusarvoisesti) työasema N1 asetetaan "Commander's Workstation" -tilaan. Kaikki muut työasemat siirretään automaattisesti operaattorin työasematilaan tietojen käsittelyä varten ja vastaava pääsy valikkoon tietojen näyttömallin mukaisesti. Päällikön päätöksellä miehistön jäsenten sijoitus voi muuttua.
Jos 97Ш6-tuote sisältää moduulin liitäntään ja tiedon hakemiseen (MS) tutkasta analogisella lähdöllä, KSA:han lisätään ylimääräinen työasema MS-operaattorille:
ARM-1 N4 tai ARM-1 N3 yhden MS:n läsnä ollessa - modifikaatiot KSMA ASGK.461262.002-01 ja ASGK.461262.002-02, vastaavasti;
ARM-1 N3 ja ARM-1 N4 kahden MS:n läsnä ollessa - KSMA ASGK.461262.002:n muunnos.
19Zh6-tutkan käyttöä varten tarvitset myös erillisen työaseman tutkaoperaattorille (ARM-1 N3) - muutos KSMA ASGK.461262.002-03.
Vuorovaikutus 19Zh6-tutkan kanssa on mahdollista myös 44B6-versioissa:
ASGK.461262.002, ASGK.461262.002-01, ASGK.461262.002-02, koska tällä hetkellä ei ole pariliitosta tutkan kanssa analogisella lähdöllä MS:n kautta. Tässä tapauksessa ARM-1 N3:a voidaan käyttää työskentelemään 19Zh6-tutkan kanssa.
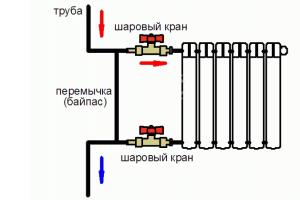
Lisäksi AWP-1-modifikaatio sisältää sovittimen asennuksen 19Zh6 (AS 19F) -tutkaliitäntää varten AWP-järjestelmäyksikköön. Kytkin PKS-C, kuten kuvasta näkyy. 1.1 on yhdistetty AWS N3:n lisäksi myös AWS N2:een. Siksi, jos N3-työasema on kiireinen työskentelyssä MS:n kanssa, tutkan käyttäjä voi suorittaa toiminnallisia tehtäviään N2-työasemalla, johon tässä tapauksessa on ladattava ohjelmajärjestelmä 19Zh6-tutkan liitäntää varten. Automatisoidun työpaikan toimintatyyppi on "Tutkaoperaattori".
3.2. LBR:n toiminnalliset vastuut
Komentaja:
analysoi automaattisen ohjausjärjestelmän järjestelmän ja laitteiston tilan ja määrittää konfiguraation tietoliikennekanavien, automaattisen ohjausjärjestelmän ja osoitettujen tehtävien teknisen kunnon mukaan;
sisällyttää laskentakompleksiin työaseman toiminnallisen tarkoituksen: "komentajan työasema" ja määrittää työaseman muulle miehistölle;
määrittää ja syöttää laskentakompleksiin järjestelmän toimintatilan (rauhanomainen, sotilaallinen) ja CSA:n (pää, yhdistetty);
suorittaa vaihdettavien arvojen nopean syöttämisen, kun tilaajan sijainti muuttuu;
kyselee olemassa olevia vertailupisteitä ja määrittää liikkuville objekteille toimivat vertailupisteet;
hallitsee kaikkien KSA-tilaajien vuorovaikutusta;
sisältää (sulkee pois työstä) tietolähteitä;
hallinnoi tietolähteitä, tiedon valintaa tilaajille ja ylemmän tason ohjauskeskuksille;
hallitsee tietojenkäsittelyalgoritmeja;
käyttää IRI-ratkaisun tuloksia IRL:n hallintaan;
käynnistää ohjelmiston uudelleen;
päättää tietojen rekisteröinnistä ja niiden peruuttamisesta;
suorittaa ilmapuolustusavainten vaihdon.
Henkilöstön päällikkö:
selventää tehtävää, määrittelee ja selventää sen toteuttamisen menetelmiä ja järjestystä;
arvioi ilmavihollisen, IRL:n alaisten kyvyt IRL:n 1.1-1.6, 3.1.2, 7.1, 7.18-7.21 päätöksen perusteella ja raportoi ehdotuksista komentajalle;
analysoi ohjaus- ja viestintäjärjestelmien tilan ja ryhtyy toimenpiteisiin niiden pitämiseksi jatkuvassa valmiustilassa;
järjestää ja valvoo tehtävien toimittamista IRL:lle ja niiden toteuttamista;
Hallitsee dokumentointia ja loppuasiakirjojen valmistelua työn tulosten perusteella.
Vanhempi tietojenkäsittelyoperaattori:
syöttää päivitetyt tiedot VO:n ominaisuuksista tietokonekompleksiin;
suorittaa operatiivisen komentoviestinnän kautta vastaanotetun tiedon manuaalisen syöttämisen;
valvoo alaiselle IRLI:lle annettujen komentojen toteuttamista;
ratkaisee tieto- ja laskentatehtävät 8.1-8.9;
valvoo tietojen antamista tarjotuille ja ylemmän tason ohjauskeskuksille.
IRP:n ratkaisemisen periaatteet ja algoritmit on annettu näiden ongelmien ohjelmistodokumentaatiossa.
Vuorovaikutusoperaattori suorittaa tehtäviä oman alueensa ylimmän tiedonkäsittelyoperaattorin tehtävien puitteissa.
MS-operaattori raportoi vanhemmalle tietojenkäsittelyoperaattorille ja vastaa ilmapuolustusreittien oikea-aikaisesta havaitsemisesta, määrittämisestä ja niiden tuen laadusta.
Operaattori MS:
sisältää ja suorittaa kattavan työpaikkansa työvalmiuden tarkastuksen;
tarkkailee jatkuvasti ilmatilannetta näyttölaitteilla ja raportoi vanhemmalle tiedonkäsittelyoperaattorille kaikista havaituista ilmapuolustuksista;
ottaa käyttöön seuranta-vilkkuvaloja VO:ta pitkin sisääntulokoordinaattiinformaation virtauksen rajoittamiseksi;
valvoo ilmapuolustuksen ominaisuuksien ja korkeuden oikea-aikaista linkittämistä ja raportoi vanhemmalle tietojenkäsittelyoperaattorille;
esittelee (muuttaa) VO:n lisäominaisuuksia vanhempien tietojenkäsittelyoperaattorin käskystä;
ilmoittaa ilmapuolustuksen katoamisesta tai niiden poistumisesta tutkan havaintoalueelta.
19Zh6-tutkaoperaattorin toiminnot ovat samanlaiset kuin MS-operaattorille kuvatut.
Suorittaessaan taistelutehtävää lyhennetyllä miehistöllä komentajan tehtäviä hoitaa komentopaikan operatiivinen päivystäjä (OD).
3.3. Insinööri- ja teknisen henkilöstön kokoonpano ja toiminnalliset vastuut
KSA 97Sh6:n insinööri- ja teknisen henkilöstön kokoonpano laitteiston huollon kiinteän rakenteen muuttamisessa ja sen jatkuvassa valmiudessa pitämisessä on esitetty taulukossa 3.3.
Taulukko 3.3
päällikkö (vanhempi insinööri, insinööri) - 1;
teknikko - 1;
Vain 2 henkilöä.
Listatun kokoonpanon lisäksi LBR:t osallistuvat CSA:n toiminnan ja toiminnan varmistamiseen.
Esimies huolehtii siitä, että laite on aina käyttövalmis ja sitä käytetään asianmukaisesti, että se on varustettu teknisillä laitteilla ja mittauslaitteilla ja että vahvistettua teknistä dokumentaatiota ylläpidetään.
Pomo on velvollinen:
tuntea täydellisesti laitesarjan ja sen toimintasäännöt, teknisten laitteiden ja mittauslaitteiden toimituksen;
jakaa miehistön henkilöstön vastuut ja johtaa heidän työtään;
varmistaa automaattisen ohjausjärjestelmän jatkuva käyttövalmius, suorittaa huolto ja henkilöstön turvallisuus- ja paloturvallisuussääntöjen noudattaminen;
ryhtyä toimenpiteisiin mittauslaitteiden oikea-aikaiseksi tarkistamiseksi ja vaihtamiseksi, laitteiden varustamiseksi ennen niiden lähettämistä korjaukseen ja yksittäisten varaosien kuluneiden teknisten laitteiden täydentämiseksi;
osallistua henkilökohtaisesti KSA-sarjan muutosten tekemiseen;
olla vuorovaikutuksessa korkeampien suunnittelu- ja teknisten palvelujen kanssa;
ylläpitää vahvistettua teknistä dokumentaatiota.
Vanhempi insinööri varmistaa, että laitteet ovat aina käyttövalmis ja toimivat oikein.
Vanhempi insinööri vastaa:
tuntea KSA-laitesarja täydellisesti ja käyttää sitä oikein;
kehittää huoltoaikatauluja;
jakaa tehtäviä henkilöstötyölle ja tarkastaa toteutuksen laatu;
kytke ACS päälle ja pois päältä, siirrä se tilasta toiseen, tarkkaile sen toimintaa;
toteuttaa monimutkaisia ehkäiseviä toimenpiteitä.
Insinööri varmistaa, että laite on aina käyttövalmis ja sitä käytetään oikein.
Insinöörin tulee:
valvoa osajärjestelmien ja teknisten välineiden toimintaa;
Suorita diagnostiikka vikatilanteissa redundanttiseen moduuliin asti ja vaihda varamoduuliin;
sisällyttää korjatun teknisen laitteen tai komponentin automaattisen ohjausjärjestelmän kokoonpanoon;
monimutkaisten ongelmien vianmääritys;
suorittaa monimutkaisia ehkäiseviä toimenpiteitä säätämällä ja käyttämällä erityisiä laitteita;
valmistele pyyntöjä tarvittavista laitteista, varaosista ja lisävarusteista.
Teknikko varmistaa automaattisen ohjausjärjestelmän uskottujen osajärjestelmien jatkuvan valmiuden ja oikean toiminnan.
Teknikon tulee:
tunnet täydellisesti automaattisen ohjausjärjestelmän määritetyt osajärjestelmät;
suorittaa uskottujen välineiden tekninen kytkeminen päälle ja pois; suorittaa teknisten laitteiden huoltoa, säätöä ja ajankohtaista korjausta, mukaan lukien vaihtoelementin tarkka diagnostiikka;
laitteiden vianmääritys.
4. CSA:N VALMISTELU TARKOITETTUA KÄYTTÖÄ VARTEN
4.1. Valmistelutyö ja sen suorittamismenettely
4.1.1. Kuinka kytkeä virta päälle
KSA 97Sh6:n kiinteän version virran kytkeminen päälle tarkoittaa KSMA 44B6 -laitteen virransyötön ja ilmanvaihdon kytkemistä päälle, jonka menettely ja järjestys on kuvattu asiakirjan KSMA ASGK.461262.002 RP kohdassa 4.
Ennen kuin kytket LBR:n virran päälle, on tarkistettava laitteiden virransyötön kytkemisen ja katkaisemisen säätimien asennus "Pois"-asentoon.
Vakioiden ja vaihtuvien arvojen laskenta ja lataaminen VK:hen on tarkoitettu tuoteohjelmiston asettamiseen toimimaan tietyn alueeseen sidotun KSA:n ulkoisten tilaajaryhmän kokoonpanon kanssa. Ohjelmisto on konfiguroitu käyttämällä erityistä vakioiden ja muuttuvien arvojen joukkoa, jotka voidaan toiminnallisen tarkoituksensa mukaan jakaa useisiin ryhmiin:
algoritmiset vakiot;
koodaustiedot;
referenssiobjektien parametrit;
dislokaatiovakiot;
staattista tietoa.
Taisteluhenkilöstö määrittää ohjelmiston syöttämällä muuttuvia arvoja, mukaan lukien:
vakiot koordinaattien muuntamiseksi tilaajan koordinaattijärjestelmästä omaan koordinaattijärjestelmäänsä ja päinvastoin;
järjestelmän elementtien seisontapisteiden koordinaatit;
vertailukohteiden koordinaatit tutkan kohdistuksen ja koordinaattien uudelleenlaskennan oikeellisuuden tarkistamiseksi;
vuorovaikutuksessa olevien tilaajien koostumus ja niiden jakautuminen PD-kanavien kesken;
vuorovaikutuksessa olevien tilaajien valintavyöhykkeiden parametrit jne.
Korvattavien arvojen syöttämisen periaate on annettu "Sovellusoppaassa" osoitteessa 44B6 (ASGK.461262.002 RP)
Vaihdettavien suureiden laskentaan käytettävät lähtötiedot tehdään ”Vaihdettavien määrien laskentamenetelmän alkutietojen laatimismenetelmä” ASGK.460088.019 vaatimusten mukaisesti.
Alkutietojen syöttö ja käsittely tapahtuu ohjeen ”Vaihtavien vakioiden laskenta-, muuttaminen ja kirjaaminen” ASGK.460039.016 mukaisesti, joka sisältää automatisoidun työpaikan IRZ:n operaattorin täyttämät taulukot ja niiden täyttösäännöt.
4.1.3. Operatiivisen komentoviestinnän käyttöönotto ja tarkistaminen
97Sh6-tuotteen käyttökomentoviestinnän (OCC) käynnistäminen ja tarkistaminen koostuu OKS KSMA 44B6:n käynnistämisestä ja sen lisävarmistuksesta.
Ennen kuin ryhdytään tarkastamaan OKS-ohjeita ulkopuolisille tilaajille, viimeksi mainitut on konfiguroitava toimimaan yhdessä KSA:n kanssa OKS:n järjestämisessä.
OKS KSMA 44B6:n käynnistäminen ja tarkistaminen on kuvattu KSMA:n IM:ssä
ASGK.461262.002 IM, kohta 5.
4.1.4. Ulkopuolisten tilaajien valmistelu yhteistyöhön
Ulkopuolisilla KSA-tilaajilla heidän taistelumiehistönsä on suoritettava seuraavat työt yhteiseen työhön valmistautuessaan:
suojataan tiedonsiirtokanavat (DTC) ja OCS-kanavat suunnassa KSA:han;
ulkoisten tilaajien omistettujen CPD- ja OCS-kanavien liittäminen vastaaviin CPD- ja OCS-kanaviin KSA:ssa;
ladataan tilaajan automaatiojärjestelmän VC:hen dislokaatiovakiot KSA 97Ш6, merkki tiedonvaihdossa käytetystä koordinaattijärjestelmästä, algoritmin tyyppi, informaatiosanoman lähetyksen tuloksen arvo ja tiedonsiirtonopeus;
todellisten ja kuvitteellisten vertailupisteiden nimikkeistön ja koordinaattien määrittäminen ja koordinointi KSA 97Sh6 -taisteluhenkilökunnan kanssa.
Menettely ulkopuolisten tilaajien taistelujoukkojen toimille suoritettaessa valmistelutöitä yhteistä toimintaa varten automatisoidun ohjausjärjestelmän kanssa määräytyy käytettävien monimutkaisten automaatiotyökalujen ohjelmiston ja teknisen dokumentaation vaatimusten mukaan.
4.2. KSA:n ensimmäinen käynnistäminen ja sen täytäntöönpanomenettely
KSA 97Sh6:n ensimmäinen käynnistys tunnistetaan KSMA:n ensimmäiseen käynnistykseen, jonka järjestys on kuvattu KSMA 44B6 ASGK.461262.002 RP:n käyttöoppaan kohdassa 4.
4.3. Tarkastustyö ja sen suorittamismenettely
4.3.1. Kattava toiminnallinen ohjaus
KSA:n kattava toiminnallinen ohjaus (CFC) sisältää sisäiset ja ulkoiset tasot.
KFK:n sisäinen taso varmistaa KSMA:n teknisen kunnon kokonaisvaltaisen seurannan.
KSMA:n teknisen kunnon kokonaisvalvonnan tulokset näkyvät näyttölaitteilla automaattisesti (yleiset tulokset) ja operaattorin pyynnöstä (yksityiskohtaiset teknisen kunnon taulukot).
AWS-näytöllä (oikeassa yläkulmassa) näkyy automaattisesti paikallisen tietokoneverkon KSMA tilaajien nykyinen tekninen tila ja heidän valmiusasteensa on merkitty värillä.
Tiedonsiirtopolkujen tilan tarkistamiseksi on tarpeen asentaa silmukat kaikille testatuille TPD:ille. TPD:n tila näkyy automatisoidun työasemanäytön kentässä 4, huollettavuusaste näkyy myös värillä.
Jos KSMA-laitteiston toimintahäiriöstä ilmaantuu tietoja, työasemaoperaattori voi KSMA-tietomallin moduulin 10 komentojen avulla (katso liite 1, ASGK.461253.008-02 RE1) hakea selvittäviä taulukoita verkon tilaajien teknisestä kunnosta. ja TPD:t.
KFK:n ulkoinen taso varmistaa, että työ KSMA:ssa suoritetaan seuraavilla tavoilla:
ulkopuolisten tilaajien teknisen kunnon ja tehokkuuden arviointi;
koordinaattien uudelleenlaskennan tarkkuuden tarkistaminen;
alisteisten lähteiden kohdistuksen valvonta;
itsenäistä ja monimutkaista koulutusta.
Yksityiskohtainen kuvaus toiminnanohjauksen periaatteista ja organisaatiosta on "Sovellusoppaassa" osoitteessa KSMA 44B6 ASGK.461262.002 RP, kappale 4.
4.3.2. Ulkopuolisten tilaajien teknisen kunnon ja tehokkuuden arviointi
Ulkopuolisten tilaajien teknisen kunnon ja tehokkuuden arvioimiseksi KSA:ssa käytetään seuraavia:
AWS-näytön oikealla puolella (kenttä 2) näytetään CPD:n tila ulkoisten tilaajien kanssa - kanavan ja ulkoisen tilaajan tila on korostettu värillä (katso liite 1, ASGK.461253.008-02 RE1);
sertifikaatti KSA:n ulkopuolisten tilaajien teknisestä kunnosta, kuulumisesta, tilasta ja tyypeistä, jonka operaattori kutsuu käskystä työasemalta (moduuli 10 komento 105.1);
taulukko tiedonsiirtopolkujen ja tietoliikennekanavien teknisestä tilasta työasemalta pyydettäessä (moduuli 10-AD-komento 105.2);
sekä tutka- että OKS-kanavien kautta vastaanotetut viestit tilaajien taisteluvalmiudesta. Kenen tahansa ulkopuolisen tilaajan taisteluvalmiutta voidaan arvioida työaseman teknisen kuntokehyksen tiedoista.
Kutsu yllä olevien tietojen näyttämiseksi suoritetaan KSA ASGK.461253.008-02 RE1 -tietomallin mukaisesti.
4.3.3. Alisteisten lähteiden kohdistuksen tarkistaminen
Tutkajärjestelmän säädön tarkoituksena on yhdistää tarkasti ohjauspisteessä kaikki eri tietolähteistä saadut koordinaattitiedot niiden omissa koordinaatistoreferenssijärjestelmissä.
CSA:lle suljettujen tutka-asemien kohdistuksen tarkistaminen suoritetaan:
tutkien käyttöä koskevien säännösten ja teknisten asiakirjojen vaatimusten mukaisesti;
pitkän tauon jälkeen työstä;
tutkan siirron aikana;
tutkan korjaus- ja kunnostustöiden päätyttyä sen saattamiseksi taisteluvalmiiseen tilaan.
Säätöohjaus suoritetaan käyttämällä todellisia referenssipisteitä (RP) tai niiden elektronisia simulaattoreita, joiden koordinaatit ladataan ohjelmiston vaihdettavien arvojen alueelle ja lasketaan suhteessa tutkakoordinaattijärjestelmän alkupisteeseen (keskipisteeseen).
Ennen kuin KSA:ssa tehdään kattava tutkasuuntauksen tarkistus, kaikille työhön osallistuville tutkaille on suoritettava itsenäiset tarkastukset näiden tuotteiden teknisen dokumentaation määräämässä laajuudessa. Tämän työn tulosten pitäisi olla positiivisia. CSA:n säädön kattavan ohjauksen suorittaa kompleksin operaattori antamalla komennot tarkistettavalle asemalle OKS-välineillä.
Kun on otettu tietty säätöpiste (AP) (ehdollinen AO, paikallinen objekti) tilastojen keruujakson (100-120 s) seurantaa ja suorittamista varten, operaattorin käskystä (KSA:n ASGK.461253.008-02 RE1 moduuli 9-UST malli), suoritetaan automaattinen laskenta säätöpisteen koordinaattien aritmeettinen keskipoikkeama tutkan tiedoista saaduista koordinaateista. Laskentatulokset voidaan antaa käyttäjän käskystä sekä näyttöä että tulostamista varten.
Perinteisten autonomisten kohdistusohjauksen menetelmien lisäksi KSA 97Sh6 tarjoaa menetelmiä systeemiseen kohdistuksen ohjaukseen, joka perustuu samojen todellisten ilmaobjektien (AO:iden) koordinaattien vertailuun, jotka tulevat eri tietolähteistä näiden AO:iden mukana. Tällaisesta vertailusta saatujen suorakulmaisten koordinaattien välisten erojen perusteella lasketaan tutkan suuntauksen virheet atsimuutissa sekä virheet dislokaatiokoordinaateissa, joiden perusteella lasketaan koordinaattien muuntokertoimet. Säädön systemaattinen ohjaus voidaan suorittaa poistamatta tarkistettavia tietolähteitä pääkäyttötilasta niiden normaalin toiminnan aikana, mikä varmistaa ohjauksen tehokkuuden. Toinen järjestelmävalvonnan ominaisuus on tarkistaa tutkajärjestelmän linjauksen lopputulos - eri lähteistä peräisin olevien tietojen yhteensopivuus, mikä mahdollistaa sellaisten säätövirheiden tunnistamisen, jotka johtuvat syistä, joita autonomisen valvonnan aikana ei havaita.
CSA:n järjestelmän ohjaustilassa voidaan käyttää seuraavia menetelmiä kohdistuksen ohjaamiseen todellisia VO:ita vastaan:
suhteellisilla koordinaattieroilla (RT);
atsimuutissa kahdelle erillään maassa sijaitsevalle tutalle (SA);
atsimuutissa pienillä kantaetäisyyksillä (MB);
tutkan (AB) poikkeaman koordinaattien oikean määrityksen valvonta.
Säädön järjestelmän ohjaukseen liittyvien ongelmien ratkaisemiseksi määritetään erot saman VO:n koordinaattien välillä X:ssä, Y:ssä, H:ssa kahden tietolähteen ohella. Näiden poikkeavuuksien keskiarvot, kun molemmat lähteet on säädetty tarkasti, eivät saa ylittää satunnaisten virheiden vaihteluväliä. Jos poikkeamat ylittävät vahvistetut rajat, tämä osoittaa virheellisen kohdistuksen.
Tarkkailu oikeilla ilmaobjekteilla antaa vähemmän tarkkuutta säätövirheiden määrittämisessä kuin seuranta paikallisten kohteiden (LM) avulla ja vaatii enemmän huomiota tarkastuksia tehtäessä. Samalla se ei ole riippuvainen referenssitiedoista ja mahdollistaa siten virheiden vaikutuksen havaitsemisen niissä sekä käyttäjävirheet MP-valvonnassa. Mahdollisuus suorittaa valvontaa järjestelmän normaalin toiminnan aikana tekee siitä toimivan.
Automatisoidun työpaikan tarkoitus, koostumus ja tärkeimmät tekniset ominaisuudet.
Työpaikka (WP) on tarkoitettu:
ü näyttää taistelu- ja palvelutietojen ilmaisimet näytöillä;
ü tietojen käsittelyn edistymisen valvonta;
ü erityisten ohjauskomentojen antaminen.
Seuraavat tiedot voidaan näyttää PM-ilmaisinnäytöillä:
a) ensisijaiset tiedot ilmatilanteesta järjestelmään liittyvistä tutkista,
kaikusignaalien muodossa, signaaleina kansallisuuden määrittämiseksi
(OGP), suuntimat, vyöhykkeiden ja vastuualojen rajat, atsimuuttimerkit (MA) ja
alue (MD);
b) komplekseista tuleva toissijainen tieto ilmatilanteesta
radiotekniikan yksiköiden automaatiolaitteet (ACA) pisteiden muodossa
(ilmaobjektien sijainnit) ja erikoismerkit (merkit, numerot)
näyttää ilmaesineiden ominaisuudet;
c) tiedot tuliaseiden ja lähteiden tilasta ja taistelutoiminnasta
tiedot;
d) tiedot ilmaobjektien kohdejakaumasta alaistensa kesken
palovälineet;
e) operaattorimerkki (MO) kohdekoordinaattien ottamiseksi ja siirtämiseksi käsittelyyn
f) aputiedot alueen kartan muodossa
ilmapuolustusryhmän taistelujärjestyksen elementit, kohteen valintavyöhykkeiden rajat jne.;
g) tiedot automaatiolaitteiden ja kanavien teknisestä kunnosta
tiedonsiirto.
1.2. RM:n kokoonpano.
Rakenteellisesti työpaikka on tehty erillisen kaapin muodossa, joka koostuu
Johon sisältyy:
ü pääilmaisinlohko (BIO);
ü lisäilmaisinlohko (ABU);
ü digitaalinen tietokonelaite (DCU);
ü vaihto- ja kauko-ohjainlaite (UPD);
ü merkkigeneraattorilohko (BGZ);
ü kauko-ohjaustilat ja -asteikot (PRM);
ü komentojen syöttöpaneeli (CI);
ü ohjauspaneeli (PU);
ü digitaalinen valintakonsoli (DN);
ü pallokoodimekanismi (BCM);
ü kolme virtalähdettä: yksi VS-158 ja kaksi VS-306;
ü viestintäkonsoli PS-15.
BIO- ja BIV-lohkoissa sekä PRM-, PU- ja PV-konsoleissa on useita muutoksia
(yhteensä 18).
Radiotekniikan prikaatin (rykmentin) KSA:n taistelukäyttö edustaa radiotekniikan yksiköiden ja prikaatin (rykmentin) komentopaikan koordinoitua toimintaa, joka on järjestetty yhden konseptin ja suunnitelman mukaan tutkatiedustelun suorittamiseksi ja tutkatietojen toimittamiseksi. ilmatilanteesta ilmapuolustusjoukon (divisioonan) komentoasemalle, tuetuille kokoonpanoille ja sotilasyksiköille ja yksiköille.
KSA:n radiotekniikan prikaatin (rykmentin) taistelukäyttömenetelmät:
Keskittämällä ponnistelut tutkatiedustelujen suorittamiseen ilmavihollisen pääjoukkojen toimintasuuntiin ja tutkatietojen toimittamiseen joukkojen (joukkojen) komento- ja valvontaelimille.
Tutkatiedustelujen jakaminen vihollisen ilmavoimien toimintasuuntiin ja tutkatietojen toimittaminen joukkojen (joukkojen) komento- ja valvontaelimille.
Keskittämällä ponnistelut ilmakohteiden jäljittämiseen ilmatorjunta-alueilla (taistelut) ja tutkatietojen toimittamiseen joukkojen (joukkojen) ja ilmatorjuntaohjusjärjestelmien komento- ja valvontaelimille.
Keskittämällä ponnistelut ilmakohteiden ja ystävällisten lentokoneiden jäljittämiseen ilmataistelualueilla (taisteluissa) ja tutkatietojen toimittamisessa joukkojen (joukkojen) komento- ja valvontaelimille ja ilmakuunteluvälineille.
Toimenpiteiden keskittäminen (jakaminen) lentokoneensa saattamiseksi lentoreittejä pitkin hyökkäämään kohteisiin, taistelualueille ja palaamaan lentokentäille sekä toimittamaan tutkatietoja joukkojen (joukkojen) ja ilmailuvälineiden komento- ja valvontaelimille.
Radiotekniikan prikaatin (rykmentin) automaattisten aseiden taistelukäytössä käytetään pääsääntöisesti yllä olevien menetelmien yhdistelmää.
Oppitunnin vetäjä määrää RLR:n komentajan (RLR PU:n päällikön) työpaikan, jota varten paina CO-näppäintä valitun RM:n ohjauspaneelista.
RLR:n komentajan RM:nä (RLR PU:n päällikkö) käytetään RM nro 2. RLR:n komentajan on varmistettava, että RM PU:n CO-näppäintä painetaan vain yhdessä toimivassa RM:ssä.
RLR:n komentajan suorittamat toimet:
Töitä organisoitaessa on muistettava, että joka kerta kun SV-4-01 käynnistetään uudelleen, kaikki RAM-muistiin tallennetut tiedot poistetaan automaattisesti, joten sen uudelleenkäynnistyksen jälkeen on tarpeen leikata uudelleen automaattisen hankintavyöhykkeet ja aihioita ja kaapata kohteita seurantaa varten. Tässä tapauksessa tavoitteet numeroidaan uudelleen ja uusi numerointi ei välttämättä vastaa sitä, joka oli ennen uudelleenkäynnistystä.
Ennen kuin aloitat työn, tarkista PKU-P ja vapauta kaikki käyttämättömät avaimet.
Seuraavat tutkat ja ohjausasemat on kytketty tutkan ohjausyksikköön:
Tutka 55Zh6, joka sijaitsee tutkalaukaisimen asemassa. Yhdistetään USS:n ensimmäiseen kanavaan ja liittimeen PS-1 UOIR;
Tutka 19Zh6 (35D6) nro 1, joka sijaitsee tutkan laukaisupaikassa. Yhdistetään toiseen USS-kanavaan ja liittimeen PB-I UOIR. Tutkaoperaattorin työasema numero 35D6 - RM No. 4;
Tutka I9Zh6 (35D6) No. 2, joka sijaitsee RLR PU -asemassa, on kytketty neljänteen USS-kanavaan ja RV-2 UOIR-liittimeen. Tutkaoperaattorin työpaikka numero 35D6 nro 2 - RM nro 4;
Tutkan ohjausyksiköstä sijaitseva tutka 35D6 on kytketty KSPD:n kolmanteen telekoodikanavaan. Etäaseman operaattorin työpaikkanumero on RM nro 5.
Kun työskentelet etätutkalla, sinun on painettava RM-ohjauspaneelin “3”-näppäintä ja PRM-laitteen P- ja AK-näppäimiä.
RTB 5N60 tai 5N55-M komentoasema on kytketty ensimmäiseen telekoodikanavaan KSDS;
Komentopiste zrp 5N83 tai komentoasema 5K34 on kytketty toiseen telekoodikanavaan KSDS;
Työn organisoinnissa RLR:n komentaja (RLR:n ohjauskeskuksen päällikkö) käyttää PKU-P- ja RM-konsoleita.
Ennen työn aloittamista paina ohjausrivin SYNCHR AOI -näppäintä, kun 86Zh6-S-laitteen toiminta synkronoidaan tutkan kanssa laukaisupulssien, atsimuuttimerkkien ja pohjoismerkkien avulla.
Voit tehdä tämän yhdistämällä kukin RM vastaaviin USS-kanaviin painamalla RM-ohjauspaneelia "1", "2", "3" tai "4"-näppäimellä.
Jos haluat näyttää biokaikusignaalit, koordinaatit ja ekstrapolointipisteet, paina O-, KT- ja ZT-näppäimiä PU RM:ssä.
Päällikön RM:ssä ET:t näytetään kaikille VP:ille, joihin liittyy tutka, ja muissa RM:issä - vain VP:issä, joihin liittyy tiedot tutkasta, johon tietty RM on yhdistetty USS-kanavan kautta.
Tutkan päällikkö on velvollinen ilmoittamaan (painamalla PKU-P:n IV rivin näppäimiä NI1, NI2, LOW ja NI4) vialliset ja toimintakyvyttömät tutkat tai ne, joista tietojen vastaanottaminen käsittelyyn on kielletty.
Kun työskentelet etätutkan 35D6 kanssa kanavalla 3, sinun on painettava PRM:n R AK -näppäimiä.
RLR:n päällikkö on velvollinen ilmoittamaan PKU-P:n IV-rivin näppäimiä P6O, P83, P55, P34, I35u painamalla CP-tyyppien 5N60, 5N83, 5N55-M, 5K34 ja etätutka 35D6 olemassaoloa. vastaavasti RLR PU:n telekoodikanavat. Lisäksi 5N60 tai 5N55-M on kytketty ADF:n ensimmäiseen suuntaan ja 5N83 ja 5K34 toiseen. Näiden kuluttajien yhteinen toiminta on mahdollista, yksi kumpaankin suuntaan. Painamalla U1-näppäintä ilmaistaan, että ohjausvaihteisto on ensimmäiseen telekoodikanavaan kytketty vaihteisto (5H60 painettaessa näppäintä P60 tai 5H55-M kun painetaan näppäintä P55). Jos U1-näppäintä ei paineta, ohjaus-CP katsotaan CP:ksi, joka on kytketty 2. telekoodikanavaan (5K34, kun P34-näppäintä painetaan).
Salli tai poista käytöstä (painamalla ZVI-näppäintä PKU-P:n IV rivillä) tutkasäteilyn automaattinen sammutus, kun PRS havaitaan. Tutkasäteily kytkeytyy pois ja päälle 5N60-komentojen mukaisesti ehdoitta.